Speedgoatのリアルタイムターゲットマシンにデフォルトで搭載しているEthernetポートでEtherCATマスタ通信が可能です。手順を示します。
1.Visual Studio(2015, 2017, 2019)をインストールしているPCにTwinCAT3.1をインストールします。TwinCAT3.1はVisual Studioのプロジェクトとして起動します。
2.TwinCAT3.1をインストールしたPCをマスタとして、スレーブ機器とEtherCAT通信をします。通信する際にネットワーク情報をもつENIファイルをTwinCAT3.1で作成します。
3.PCの代わりにSpeedgoatのリアルタイムターゲットマシンをマスタとしてスレーブ機器と通信します。
SpeedgoatのリアルタイムターゲットマシンでEtherCATマスタ通信を行う場合、モデル上にEtherCAT Initブロックを配置することで、スレーブとのオペレーショナルモードによる通信を行うことができます。
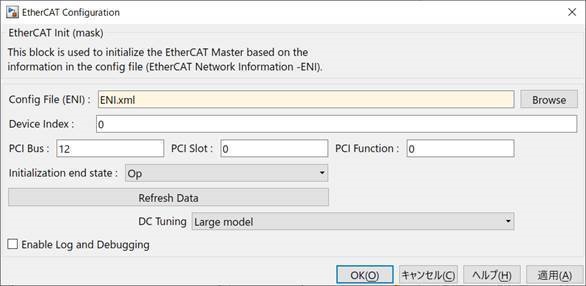
ブロックのConfig Fileには2.で作成したENIファイルを指定します。PCI BusにはEtherCAT通信で使用するEthernetカード(ポート)を指定します。EthernetカードのPCI BusはSpeedgoat社から提供される資料Technical Reference Information and Full System Testで確認することができます。
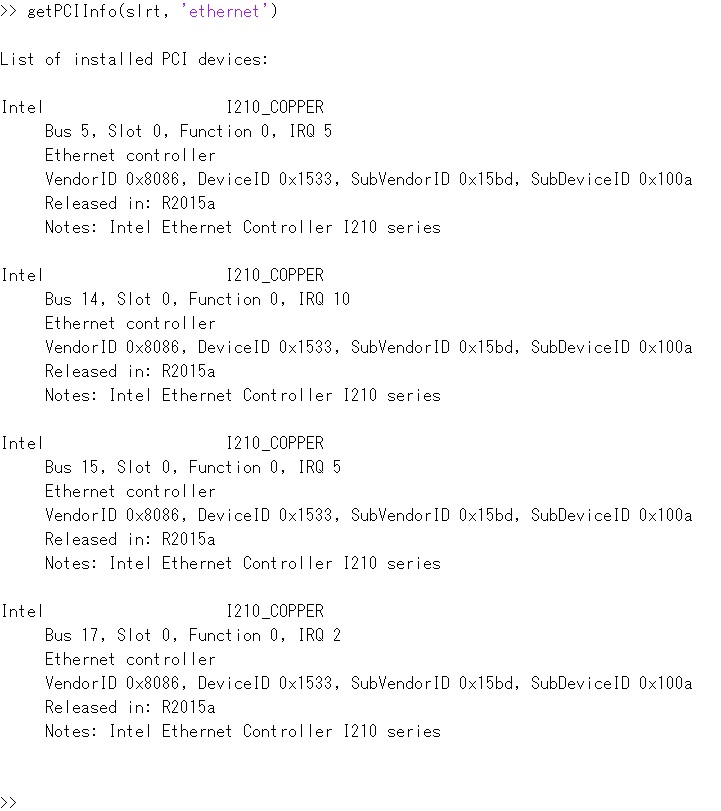
より詳細な情報はMATLABのコマンドウィンドウでgetPCIInfoコマンドを実行することにより確認できます。